The VRAS group has successfully helped the global open-source robotics community by implementing the first plausible simulation model of tracked vehicles. The model has just been made available to everyone as part of the Gazebo simulator Among others, it will help the CRAS-CTU team in the global DARPA SubT challenge where a team of robots …
read more
Dean’s Award for the Dissertation thesis was given to
Ing. Vladimír Kubelka successfully defended his Ph.D. thesis entitled Improving perception and locomotion capabilities of mobile robots in urban search and rescue missions (supervisor: doc. Ing. Tomáš Svoboda, Ph.D., supervisor specialist: Ing. Michal Reinštein, Ph.D.). Congratulations!
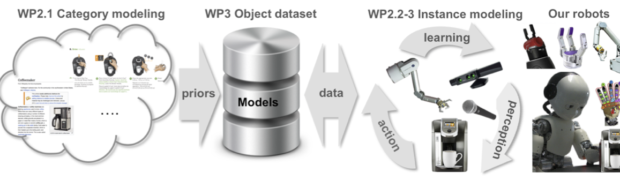
We are partners in a new European research project (CHIST-ERA call) IPALM – Interactive Perception-Action-Learning for Modelling Objects coordinated by Imperial College London. Matej Hoffmann is the PI for our part. The objective of the project is to develop methods for the automatic digitization of objects and their physical properties by exploratory manipulations. The methods …
read more
Matěj Hoffmann is co-organizing a workshop at IEEE/RSJ International Conference on Intelligent Robots and Systems IROS2018. BODIS: The utility of body, interaction and self learning in robotics.
Work in collaboration with IIT Genoa and Yale University on Compact real-time avoidance on a humanoid robot for human-robot interaction appeared at the HRI 2018 Conference held in Chicago. [pdf @ arxiv | youtube video]
A typical feature of mammals lies in their ability to experience sensations, something that robots are beginning to imitate. With the help of artificial skins and algorithms, our researchers have managed to make a small humanoid robot aware of human contact and even notice if someone is invading his ‘living’ space. The little android with …
read more
Ing. Tomáš Petříček successfully defended his Ph.D. thesis entitled Coupled Learning and Planning for Active 3D Mapping (supervisor: doc. Ing. Tomáš Svoboda, Ph.D.). Congratulations!
Matěj Hoffmann from the group Vision for Robotics Autonomous Systems (VRAS) was a member of the team who won the Kuka Innovation Award 2018, see the video.
The project RobotBodySchema (or “Robot self-calibration and safe physical human-robot interaction inspired by body representations in primate brains”), investigated by the team of Mgr. Matej Hoffmann, Ph.D., became a Partnering project of the Human Brain Project. Congratulations!