A typical feature of mammals lies in their ability to experience sensations, something that robots are beginning to imitate. With the help of artificial skins and algorithms, our researchers have managed to make a small humanoid robot aware of human contact and even notice if someone is invading his ‘living’ space. The little android with …
read more
Matěj Hoffmann from the group Vision for Robotics Autonomous Systems (VRAS) was a member of the team who won the Kuka Innovation Award 2018, see the video.
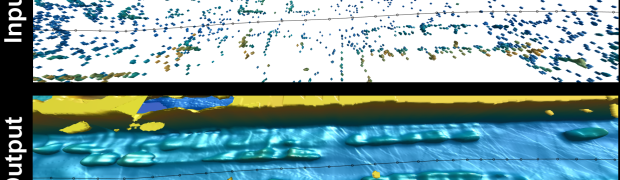
Karel Zimmermann presents at ICCV 2017 paper K. Zimmermann, T. Petricek, V. Salansky, T. Svoboda. Learning for Active 3D Mapping.
Paper of authors K. Zimmermann, T. Petricek, V. Salansky, and T. Svoboda was accepted as oral presentation at ICCV 2017! We propose an active 3D mapping method for depth sensors, which allow individual control of depth-measuring rays, such as the newly emerging solid-state lidars. The method simultaneously (i) learns to reconstruct a dense 3D occupancy …
read more
A 4-page cover story about humanoid robotics in Respekt (a major Czech weekly journal), 16/2017. Matej Hoffmann and Zdenek Straka interviewed and photographed with robots. More robots mentioned in the electronic version of the story. The printed version also available at ihned.cz.
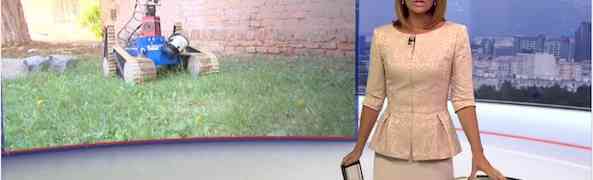
A rescue ground robot is going to Italy after earthquake. Real deployment event featured in Czech TV main news. Department is collaborating with CIIRC within TRADR project.
Enable-S3 is a large ECSEL-JU project called European Initiative to Enable Validation for Highly Automated Safe and Secure Systems. Tomas Svoboda is the PI of the CTU part. We will closely collaborate with ValeoCZ working on boosting rare data into the learning and testing in automatic driving.
Tomáš Svoboda discussed on DVTV with Martin Veselovský the future of transportation systems and autonomous vehicles (in Czech). Many thanks for successful representation of our department!
Our colleague, Assoc. Prof. Tomáš Svoboda (Center for Machine Perception, Center for Robotics and Autonomous Systems, was invited to the Magazine Leonardo (in Czech) of the Czech Radio Plus channel. He discussed (in Czech) about a rescue robot called TRADR. Many thanks for the representation of our department!
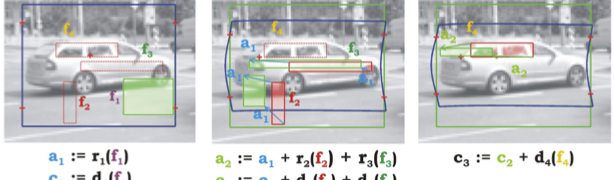
The successively evaluated features used in a sliding window detection process to decide about object presence/absence also contain knowledge about object deformation. We exploit these detection features to estimate the object deformation. Estimated deformation is then immediately applied to not yet evaluated features to align them with the observed image data. In our approach, the …
read more