| Abstract: | 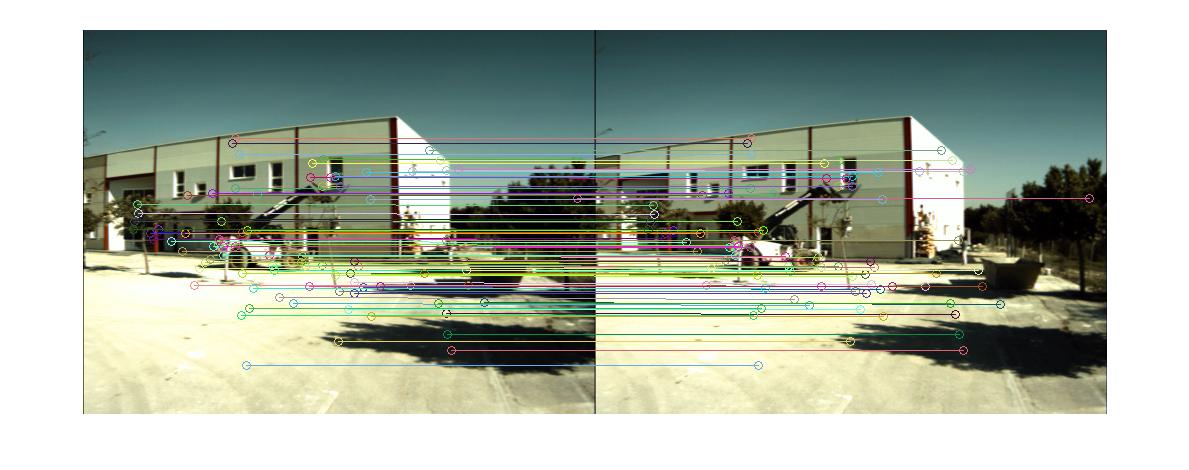 This diploma thesis deals with a problem of the mobile robot localization
in an unknown outdoor environment. The studied localization
problem is based on processing observations of the robot surroundings
sensed by its exteroceptors providing a set of measurements
called scan. Such a scan contains a percepted features of the
environment that are used in a scan-to-scan localization method. The
method provides an estimation of the robot pose transformation describing
the robot motion (from which the global robot pose is determined)
and the precision of the estimation is influenced by a noise
and outliers in the input datasets (scans). In this thesis, a new estimation
technique called Least Entropy-Like (LEL) to find parameters
of the transformation is studied in the context of the mobile robot localization
problem. This technique has been designed to be robust to
a dataset corrupted by a significant amount of outliers, and therefore,
it is a promising technique to solve the localization problem.
The main goal of the thesis is to evaluate and verify the performance
of LEL in a serie of experiments and realistic scenarios of mobile
robot localization to provide a realistic expectation of the performance
in a real deployment of the method. The considered robot localization
system is based on a stereoscopic camera system and extraction
of features from the image using the Speeded-Up Robust Feature
(SURF) detection and estimation of the feature’s depth from the disparity
between the left and right images and known parameters of
the cameras. In addition to evaluation of the estimation technique
for outliers, the technique is evaluated also according to the quality
of found correspondences between features in two consecutive
scans. Moreover, a new data association method is proposed to extract
only strong feature correspondences, which positively impact
the performance of the LEL technique. Besides, an overview of localization
techniques and their comparison is presented. Finally, the
properties and discovered findings are presented in the conclusion. This diploma thesis deals with a problem of the mobile robot localization
in an unknown outdoor environment. The studied localization
problem is based on processing observations of the robot surroundings
sensed by its exteroceptors providing a set of measurements
called scan. Such a scan contains a percepted features of the
environment that are used in a scan-to-scan localization method. The
method provides an estimation of the robot pose transformation describing
the robot motion (from which the global robot pose is determined)
and the precision of the estimation is influenced by a noise
and outliers in the input datasets (scans). In this thesis, a new estimation
technique called Least Entropy-Like (LEL) to find parameters
of the transformation is studied in the context of the mobile robot localization
problem. This technique has been designed to be robust to
a dataset corrupted by a significant amount of outliers, and therefore,
it is a promising technique to solve the localization problem.
The main goal of the thesis is to evaluate and verify the performance
of LEL in a serie of experiments and realistic scenarios of mobile
robot localization to provide a realistic expectation of the performance
in a real deployment of the method. The considered robot localization
system is based on a stereoscopic camera system and extraction
of features from the image using the Speeded-Up Robust Feature
(SURF) detection and estimation of the feature’s depth from the disparity
between the left and right images and known parameters of
the cameras. In addition to evaluation of the estimation technique
for outliers, the technique is evaluated also according to the quality
of found correspondences between features in two consecutive
scans. Moreover, a new data association method is proposed to extract
only strong feature correspondences, which positively impact
the performance of the LEL technique. Besides, an overview of localization
techniques and their comparison is presented. Finally, the
properties and discovered findings are presented in the conclusion.
|
|---|