| Abstract: | 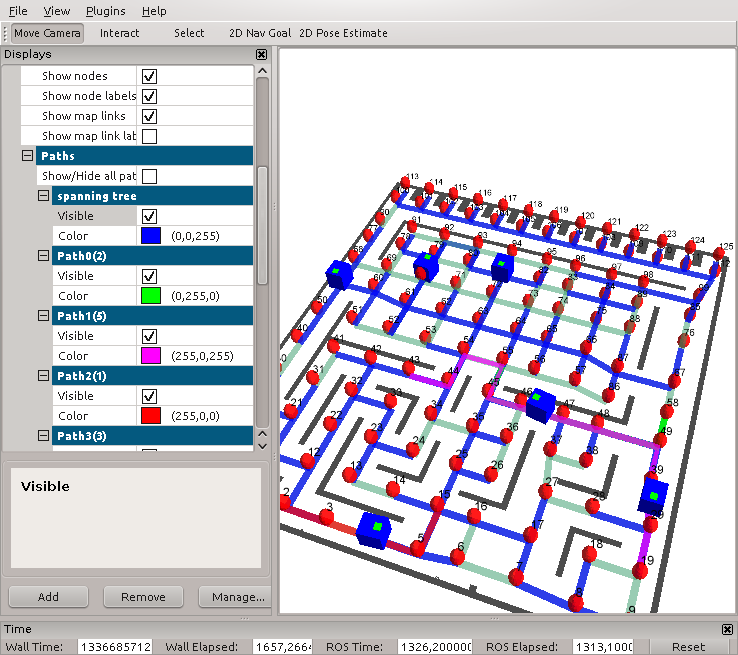 Diplomová práce se zabývá plánováním cest pro více robotů pohybujících se současně ve společném prostředí. Konkrétně je popsán a diskutován vícefázový algoritmus s odděleným plánováním uvedený Mikem Paesgoodem, který využívá kostru grafu k zajištění bezkolizních cest. První část práce popisuje zkoumaný algoritmus a je doplněna o vlastní pozorování zjištěná při studování algoritmu.
Ve druhé části je popisována implementace tohoto algoritmu v C++ spolu s návrhy na zlepšení některých jeho částí. Součástí implementace je i rozhraní pro systém ROS a integrace algoritmu do mechanismu pro přípravu robotů v systému SyRoTek.
Třetí část prezentuje výsledky navržených optimalizací a implementovaného algoritmu. Součástí hodnocení je také ukázka nalezeného řešení na ilustračním příkladu. Diplomová práce se zabývá plánováním cest pro více robotů pohybujících se současně ve společném prostředí. Konkrétně je popsán a diskutován vícefázový algoritmus s odděleným plánováním uvedený Mikem Paesgoodem, který využívá kostru grafu k zajištění bezkolizních cest. První část práce popisuje zkoumaný algoritmus a je doplněna o vlastní pozorování zjištěná při studování algoritmu.
Ve druhé části je popisována implementace tohoto algoritmu v C++ spolu s návrhy na zlepšení některých jeho částí. Součástí implementace je i rozhraní pro systém ROS a integrace algoritmu do mechanismu pro přípravu robotů v systému SyRoTek.
Třetí část prezentuje výsledky navržených optimalizací a implementovaného algoritmu. Součástí hodnocení je také ukázka nalezeného řešení na ilustračním příkladu.
|
|---|