| Abstract: | 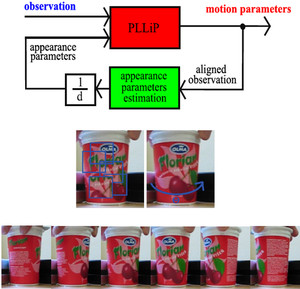 We propose tracking method which is based on Linear Predictor (LLiP) suitable for objects with variable appearance. Linear Predictor is a learned linear mapping between observed intensities and motion. Since object appearance may change (e.g. due to non-rigid deformation) we propose Parametric Linear Predictor (PLLiP), which is adjusted by the appearance. PLLiP tracking algorithm first aligns the object with current image data and then estimates actual appearance parameters that adjust PLLiP for the next image. We experimentally show that PLLiP has lower motion estimation error than LLiP which does not use extended information of actual object appearance. We propose tracking method which is based on Linear Predictor (LLiP) suitable for objects with variable appearance. Linear Predictor is a learned linear mapping between observed intensities and motion. Since object appearance may change (e.g. due to non-rigid deformation) we propose Parametric Linear Predictor (PLLiP), which is adjusted by the appearance. PLLiP tracking algorithm first aligns the object with current image data and then estimates actual appearance parameters that adjust PLLiP for the next image. We experimentally show that PLLiP has lower motion estimation error than LLiP which does not use extended information of actual object appearance. |
|---|