| Abstract: | 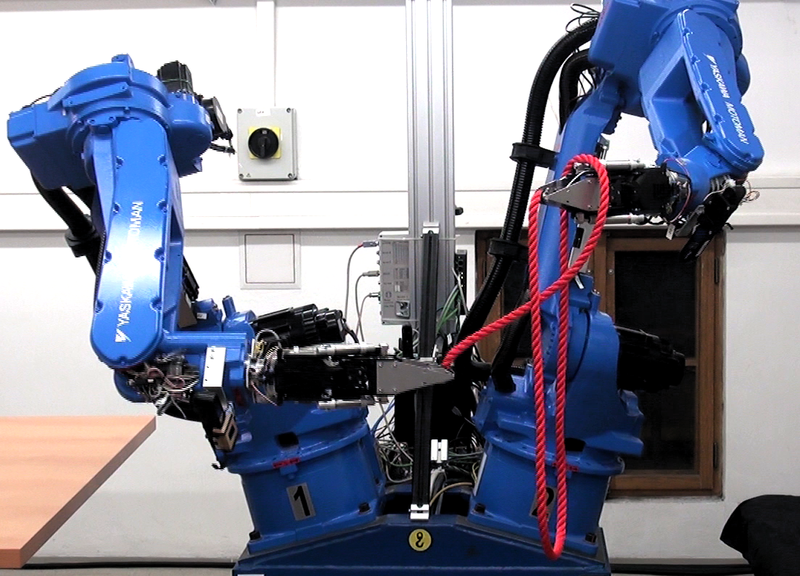 The thesis explores the possibilities of a various sensoric feedback loops
that mimic the human visual and tactile sensing in complex robotic ma-
nipulation tasks. I developed four use cases that involve various soft
object manipulation tasks with the two-arm CloPeMa robot such as
shooting projectiles from a slingshot, tying an overhand knot, catching a
swinging gymnastic pole and regrasping a piece of a rope from one robot
arm to the another one. These four use cases will enrich the repository
of sensing/manipulation skills in CloPeMa project and beyond it. The thesis explores the possibilities of a various sensoric feedback loops
that mimic the human visual and tactile sensing in complex robotic ma-
nipulation tasks. I developed four use cases that involve various soft
object manipulation tasks with the two-arm CloPeMa robot such as
shooting projectiles from a slingshot, tying an overhand knot, catching a
swinging gymnastic pole and regrasping a piece of a rope from one robot
arm to the another one. These four use cases will enrich the repository
of sensing/manipulation skills in CloPeMa project and beyond it.
|
|---|