| Abstract: | 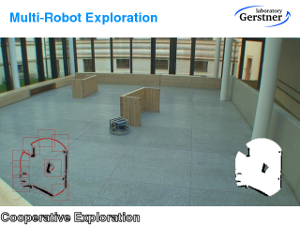 The thesis deals with problems of single robot and multirobotic exploration and simultaneous map building of an unknown environment.
The work is inspired by the ARIEL system, which is described in the articles~\cite{Yamauchi98} and~\cite{Yamauchi98-2}.
In addition, it is extended to cope with real-time map updating and more frequent replanning of target frontiers and paths.
The multirobotic exploration deals with coordination and cooperation of robots, especially aspect which have not been addressed by authors of the ARIEL.
The thesis solves following problems: building of 2D grid map, integration of sensorial data into the map, path planning on the grid, determination of places for exploration and also problems related to the multirobotic exploration such as mutual path avoidance and cooperation.
Experimental results of the simulated environment are presented and discussed.
The results show the effect of number of robots and the effect of cooperation to performance of the exploration task.
Experimental result of the experiment with two real robots are presented as well.
It shows, that developed system can be used for mapping of real static indoor environments. The thesis deals with problems of single robot and multirobotic exploration and simultaneous map building of an unknown environment.
The work is inspired by the ARIEL system, which is described in the articles~\cite{Yamauchi98} and~\cite{Yamauchi98-2}.
In addition, it is extended to cope with real-time map updating and more frequent replanning of target frontiers and paths.
The multirobotic exploration deals with coordination and cooperation of robots, especially aspect which have not been addressed by authors of the ARIEL.
The thesis solves following problems: building of 2D grid map, integration of sensorial data into the map, path planning on the grid, determination of places for exploration and also problems related to the multirobotic exploration such as mutual path avoidance and cooperation.
Experimental results of the simulated environment are presented and discussed.
The results show the effect of number of robots and the effect of cooperation to performance of the exploration task.
Experimental result of the experiment with two real robots are presented as well.
It shows, that developed system can be used for mapping of real static indoor environments. |
|---|