Stránka pouze v anglické verzi.
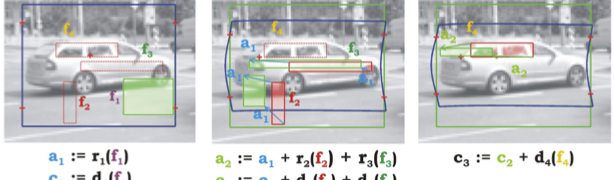
Úspěšně ohodnocené rysy, které byly použity v rámci klouzavého okna k rozhodnutí, zda na daném místě je/není objekt, obsahují také znalost o deformaci objektu. Tyto detekční rysy proto využíváme k odhadu deformace objektu. Odhadnutá deformace je následně aplikována na rysy, které dosud nebyly ohodnoceny, a ty jsou tak přizpůsobeny pozorovanému obrázku. Náš přístup učí zarovnání …
read more
Výzkumná skupina multirobotických systémů se zabývá problémy spojenými s plánováním pohybu, řízením a koordinací týmů pozemních, vzdušných a modulárních robotů. Nenechte si ujít demo stránku skupiny MRS!