Dron Eagle.One předvedl ve věznici v Rapoticích na Třebíčsku demonstrativní odchyt narušitelského dronu, který by do věznice mohl pašovat zakázané předměty. Osmivrtulový dron vážící asi 15 kilogramů je vybavený pozemní lokalizační jednotkou a umělou inteligencí a je za letu schopen rozvinout pod sebe síť, do které zachytí menší, narušitelský dron. Kromě ochrany věznic může být …
read more
Ve spolupráci se skupinou ČEPS autonomní drony skupiny MRS provedly demo inspekci elektrického vedení u Libomyšle, a demonstrovaly tak stávající výsledky výzkumu a výstupy práce na evropském projektu Aerial-Core. Elektrické vedení bylo zkontrolováno skupinou autonomně letících dronů, které během letu pořídily různé foto a video záznamy (např. detailní záběry jednotlivých izolátorů). Součástí demonstrace byla také …
read more
Naši odborníci ze skupiny Multirobotických systémů (MRS) se spojili se společností ADVACAM, se kterou pracují na vývoji dronu samostatně vyhledávajícího radiaci. Oproti současným systémům může dron využívat výhodnou kombinaci malého rozměru a flexibility, takže lze zařízení používat v obtížně přístupných terénech. Drony budou vybaveny špičkovou detekční technikou, která umožňuje naleznout zdroj záření až 100krát efektivněji, …
read more
Stránka pouze v anglické verzi.
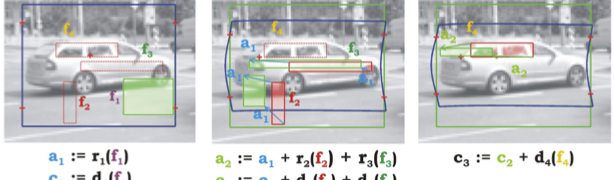
Úspěšně ohodnocené rysy, které byly použity v rámci klouzavého okna k rozhodnutí, zda na daném místě je/není objekt, obsahují také znalost o deformaci objektu. Tyto detekční rysy proto využíváme k odhadu deformace objektu. Odhadnutá deformace je následně aplikována na rysy, které dosud nebyly ohodnoceny, a ty jsou tak přizpůsobeny pozorovanému obrázku. Náš přístup učí zarovnání …
read more
Výzkumná skupina multirobotických systémů se zabývá problémy spojenými s plánováním pohybu, řízením a koordinací týmů pozemních, vzdušných a modulárních robotů. Nenechte si ujít demo stránku skupiny MRS!