RNDr. Jan Stria úspěšně obhájil svou dizertační práci s názvem Visual Perception of Garments for their Robotic Manipulation Školitel: prof. Ing. Václav Hlaváč, CSc, Co-Supervisor: doc. RNDr. Daniel Průša, Ph.D Gratulujeme!
Ing. Čeněk Albl úspěšně obhájil svou dizertační práci s názvem 3D reconstruction with time variant geometry Školitel: doc. Ing. Tomáš Pajdla, Ph.D. Školitel-specialista: RNDr. Zuzana Kúkelová, Ph.D. Gratulujeme!
Martin Bresler úspěšně obhájil svou dizertační práci s názvem Understanding Formal Arrow-Connected Diagrams and Free-form Sketches (školitel: prof. Václav Hlaváč). Gratulujeme!
V grantové soutěži GAČR za rok 2015 uspěli 3 členové naší katedry, a získali tak granty pro roky 2016-2018: Ing. Tomáš Werner, Ph.D. – řešitel – téma Pravděpodobnostní grafové modely a hluboké učení, Ing. Petr Křemen, Ph.D. – spoluřešitel – grant spolu s MFF UK, Ing. Daniel Novák, Ph.D. – spoluřešitel – grant spolu s …
read more
Tomáš Svoboda diskutoval na DVTV s Martinem Veselovským o budoucnosti hromadné a osobní dopravy a o autonomních vozidlech. Děkujeme za reprezentaci katedry!
Náš kolega, doc. Tomáš Svoboda, z Centra strojového vnímání, Centra robotiky a autonomních systémů, byl hostem Magazínu Leonardo stanice Plus Českého rozhlasu. Hovořil o záchranářském robotu TRADR. Děkujeme za reprezentaci naší katedry.
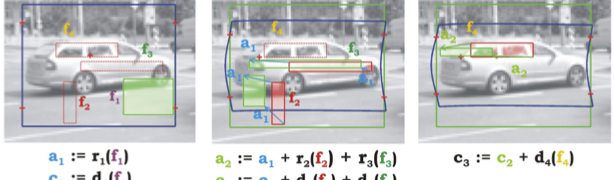
Úspěšně ohodnocené rysy, které byly použity v rámci klouzavého okna k rozhodnutí, zda na daném místě je/není objekt, obsahují také znalost o deformaci objektu. Tyto detekční rysy proto využíváme k odhadu deformace objektu. Odhadnutá deformace je následně aplikována na rysy, které dosud nebyly ohodnoceny, a ty jsou tak přizpůsobeny pozorovanému obrázku. Náš přístup učí zarovnání …
read more
Daniel Průša a Tomáš Werner publikovali článek s názvem Universality of the Local Marginal Polytope v časopisu IEEE Trans. on Pattern Analysis and Machine Intelligence. Gratulujeme!
David Hurych úspěšně obhájil svou dizertační práci s názvem Linear Predictors for Real-time Object Tracking and Detection (školitel: Doc. Tomáš Svoboda). Gratulujeme!
18. srpna 2014 odvysílala TV Barrandov krátkou reportáž o dronech a mobilních robotech na naší katedře (reportáž začíná v čase 24:10). Děkujeme Michalu Reinsteinovi za reprezentaci katedry!