
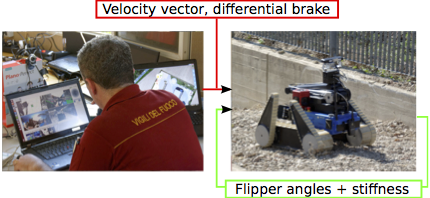
Adaptive traversability we understand by means of autonomous motion control adapting the robot morphology—configuration of articulated parts and their compliance—to traverse unknown complex terrain with obstacles in an optimal way. The robot measures its state (like: orientation angles, flipper mode, …) and the terrain (digital elevation model). We learn the optimal policy from loosely annotated robot trajectories by using reinforcement learning.
- Videos: prague_rail_yard_mov_0075, NIFTi_Adaptive_Traversability_Y4review_Prato.
- K. Zimmermann, P. Zuzanek, M.Reinstein, V.Hlavac. Adaptive Traversability of Unknown Complex Terrain with Obstacles for Mobile Robots, In IEEE Int. Conf. on Robotics and Automation, ICRA 2014, pp. 5177-5182, 2014 [pdf]
- K. Zimmermann, P. Zuzanek, M. Reinstein, T. Petricek, V. Hlavac. Adaptive Traversability of Partially Occluded Obstacles. ICRA 2015, pp 3959-3964