RNDr. Jan Stria successfully defended his PhD thesis entitled Visual Perception of Garments for their Robotic Manipulation Supervisor: prof. Ing. Václav Hlaváč, CSc, Co-Supervisor: doc. RNDr. Daniel Průša, Ph.D Congratulations!
Ing. Čeněk Albl successfully defended his Ph.D. thesis entitled 3D reconstruction with time variant geometry Supervisor: doc. Ing. Tomáš Pajdla, Ph.D. Supervisor – specialist: RNDr. Zuzana Kúkelová, Ph.D. Congratulations!
Martin Bresler successfully defended his Ph.D. thesis entitled Understanding Formal Arrow-Connected Diagrams and Free-form Sketches (supervisor: Prof. Václav Hlaváč). Congratulations!
A rescue ground robot is going to Italy after earthquake. Real deployment event featured in Czech TV main news. Department is collaborating with CIIRC within TRADR project.
In the Czech Science Foundation grant competition for 2015, three members of our department succeeded and obtained grants for 2016 – 2018: Ing. Tomas Werner, Ph.D. – coordinator, Ing. Petr Kremen, Ph.D. – grant with Faculty of Mathematics and Physics, Charles University in Prague, Ing. Daniel Novak, Ph.D. – grant with the 1st Faculty of …
read more
Tomáš Svoboda discussed on DVTV with Martin Veselovský the future of transportation systems and autonomous vehicles (in Czech). Many thanks for successful representation of our department!
Our colleague, Assoc. Prof. Tomáš Svoboda (Center for Machine Perception, Center for Robotics and Autonomous Systems, was invited to the Magazine Leonardo (in Czech) of the Czech Radio Plus channel. He discussed (in Czech) about a rescue robot called TRADR. Many thanks for the representation of our department!
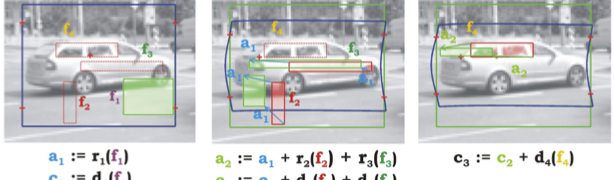
The successively evaluated features used in a sliding window detection process to decide about object presence/absence also contain knowledge about object deformation. We exploit these detection features to estimate the object deformation. Estimated deformation is then immediately applied to not yet evaluated features to align them with the observed image data. In our approach, the …
read more
We design and evaluate a data fusion system for localization of a mobile skid-steer robot intended for USAR missions. We exploit a rich sensor suite including both proprioceptive (inertial measurement unit and tracks odometry) and exteroceptive sensors (omnidirectional camera and rotating laser rangefinder). To cope with the specificities of each sensing modality (such as significantly …
read more
Adaptive traversability we understand by means of autonomous motion control adapting the robot morphology—configuration of articulated parts and their compliance—to traverse unknown complex terrain with obstacles in an optimal way. The robot measures its state (like: orientation angles, flipper mode, …) and the terrain (digital elevation model). We learn the optimal policy from loosely annotated …
read more