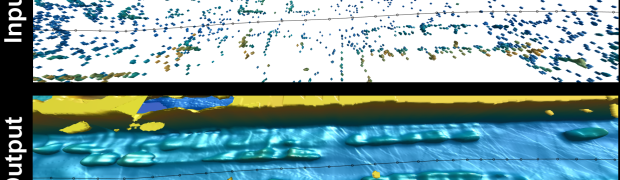
Paper of authors K. Zimmermann, T. Petricek, V. Salansky, and T. Svoboda was accepted as oral presentation at ICCV 2017! We propose an active 3D mapping method for depth sensors, which allow individual control of depth-measuring rays, such as the newly emerging solid-state lidars. The method simultaneously (i) learns to reconstruct a dense 3D occupancy …
read more
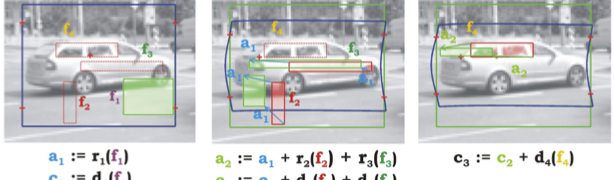
The successively evaluated features used in a sliding window detection process to decide about object presence/absence also contain knowledge about object deformation. We exploit these detection features to estimate the object deformation. Estimated deformation is then immediately applied to not yet evaluated features to align them with the observed image data. In our approach, the …
read more
We design and evaluate a data fusion system for localization of a mobile skid-steer robot intended for USAR missions. We exploit a rich sensor suite including both proprioceptive (inertial measurement unit and tracks odometry) and exteroceptive sensors (omnidirectional camera and rotating laser rangefinder). To cope with the specificities of each sensing modality (such as significantly …
read more
Adaptive traversability we understand by means of autonomous motion control adapting the robot morphology—configuration of articulated parts and their compliance—to traverse unknown complex terrain with obstacles in an optimal way. The robot measures its state (like: orientation angles, flipper mode, …) and the terrain (digital elevation model). We learn the optimal policy from loosely annotated …
read more
The research group of Multi-Robot Systems studies issues related to motion planning, control and coordination of teams of ground, aerial and modular robots. See the MRS research group demo page for details!