Matěj Hoffmann from the group Vision for Robotics Autonomous Systems (VRAS) was a member of the team who won the Kuka Innovation Award 2018, see the video.
The project RobotBodySchema (or “Robot self-calibration and safe physical human-robot interaction inspired by body representations in primate brains”), investigated by the team of Mgr. Matej Hoffmann, Ph.D., became a Partnering project of the Human Brain Project. Congratulations!
Karel Zimmermann presents at ICCV 2017 paper K. Zimmermann, T. Petricek, V. Salansky, T. Svoboda. Learning for Active 3D Mapping.
Ing. Vladimir Kubelka, a PhD. student of Artificial inteligence and biocybernetics, presented a rescue mobile robot Charlie, which is involved in project TRADR, and invited the viewers to the “Night of scientists“(in czech only) in Studio 6, a Czech TV morning show. Many thanks for the representation of our faculty!
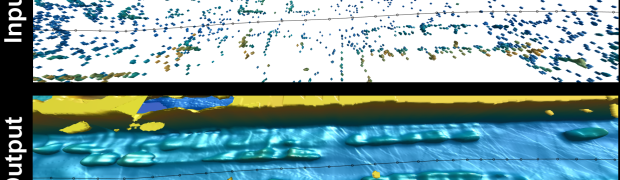
Zdenek Straka and Matej Hoffmann were awarded ENNS Best Paper Award at 26th International Conference on Artificial Neural Networks (ICANN17) for their paper Learning a Peripersonal Space Representation as a Visual-Tactile Prediction Task.
Arun Mukundan, Giorgos Tolias and Ondrej Chum received the best science paper honourable mention at the British Machine Vision Conference (BMVC) 2017 for their article Multiple-kernel Local-patch Descriptor.
Paper of authors K. Zimmermann, T. Petricek, V. Salansky, and T. Svoboda was accepted as oral presentation at ICCV 2017! We propose an active 3D mapping method for depth sensors, which allow individual control of depth-measuring rays, such as the newly emerging solid-state lidars. The method simultaneously (i) learns to reconstruct a dense 3D occupancy …
read more
Karel Zimmermann has successfully defended his habilitation thesis Safe Adaptive Traversability with Incomplete Data. Congratulation!
Assoc. Prof. Tomáš Svoboda (Vision for Robotics and Autonomous Systems) was a guest on CT24 speaking on the topic: USA: Shared Autonomous Transport in 13 Years? (the interview in Czech language only starts at about 0:15:56).
A 4-page cover story about humanoid robotics in Respekt (a major Czech weekly journal), 16/2017. Matej Hoffmann and Zdenek Straka interviewed and photographed with robots. More robots mentioned in the electronic version of the story. The printed version also available at ihned.cz.