Vision for Robotics and Autonomous Systems group (https://cyber.felk.cvut.cz/vras/) seeks one excellent PhD student and one PostDoc on the following fully-funded positions: DARPA Subterranenan Challenge: Cutting-edge research in the autonomous mapping (SLAM) for mobile robotics. We are expanding the team that just won the DARPA SubT challenge to help us to help us to win again! …
read more
Matej Hoffmann has been awarded the “GAČR EXPRO” project for excellence in fundamental research from the Czech Science Foundation (https://gacr.cz/grantove-projekty-excelence-v-zakladnim-vyzkumu-expro/) for his proposal entitled “Whole-body awareness for safe and natural interaction: from brains to collaborative robots”. The grant will support him and his group for 5 years (2020-2024). As robots are leaving safety fences and …
read more
It doesn’t happen every day that you appear in the main evening broadcasting at Czech TV (Česká televize). It does for example when you win DARPA SubT Challenge among self-funded teams. Amazing success of ČVUT FEL team CTU-CRAS formed by our teams Multi-robot Systems (Martin Saska) and Vision for Robotics and Autonomous Systems (Tomáš Svoboda) and colleagues …
read more
Doc. Ing. Karel Zimmermann, Ph.D., received the Dean’s Award for teaching in the academic year 2018/19 for the course Robotics Vision. Teachers are awarded for teaching results based on the recommendation of the Dean’s Committee. The committee decision is based on the results of the students´ verbal survey, suggestions of the heads of departments, and …
read more
The DARPA Subterranean Challenge Tunnel Circuit took place in Pittsburgh, USA on 15-22 August. A team of CTU-CRAS scientists and students from the Department of Cybernetics and Computer Department of the Faculty of Electrical Engineering of the Czech Technical University in Prague demonstrated a multirobotic system for searching the areas affected by the disaster. CTU-CRAS …
read more
The VRAS group has successfully helped the global open-source robotics community by implementing the first plausible simulation model of tracked vehicles. The model has just been made available to everyone as part of the Gazebo simulator Among others, it will help the CRAS-CTU team in the global DARPA SubT challenge where a team of robots …
read more
Dean’s Award for the Dissertation thesis was given to
Ing. Vladimír Kubelka successfully defended his Ph.D. thesis entitled Improving perception and locomotion capabilities of mobile robots in urban search and rescue missions (supervisor: doc. Ing. Tomáš Svoboda, Ph.D., supervisor specialist: Ing. Michal Reinštein, Ph.D.). Congratulations!
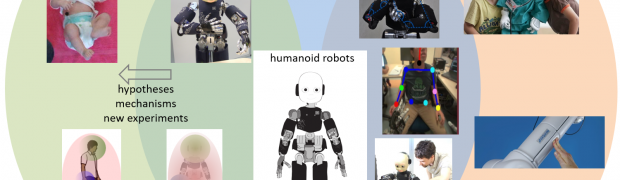
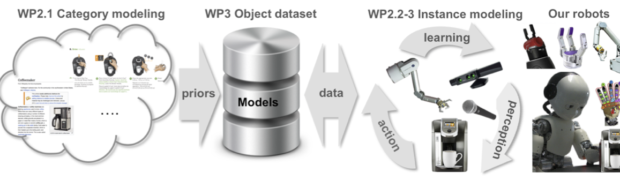
We are partners in a new European research project (CHIST-ERA call) IPALM – Interactive Perception-Action-Learning for Modelling Objects coordinated by Imperial College London. Matej Hoffmann is the PI for our part. The objective of the project is to develop methods for the automatic digitization of objects and their physical properties by exploratory manipulations. The methods …
read more
Matěj Hoffmann is co-organizing a workshop at IEEE/RSJ International Conference on Intelligent Robots and Systems IROS2018. BODIS: The utility of body, interaction and self learning in robotics.