The VRG group has successfully helped to extend the official PyTorch ecosystem. The group developed the new Kornia Deep Learning library which recently have been added to PyTorch ecosystem. PyTorch is the 2nd popular deep learning framework in the world, so it is kind of big deal. One of the core developers of the kornia …
read more
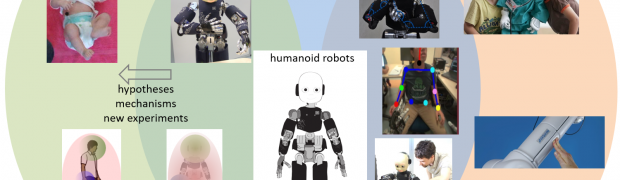
Matej Hoffmann has been awarded the “GAČR EXPRO” project for excellence in fundamental research from the Czech Science Foundation (https://gacr.cz/grantove-projekty-excelence-v-zakladnim-vyzkumu-expro/) for his proposal entitled “Whole-body awareness for safe and natural interaction: from brains to collaborative robots”. The grant will support him and his group for 5 years (2020-2024). As robots are leaving safety fences and …
read more
Martin Saska received a new European H2020 grant! He serves as the PI of CTU part of “AERIAL-CORE: AERIAL COgnitive integrated multi-task Robotic system with Extended operation range and safety” coordinated by University of Sevilla. The main objective of AERIAL-CORE is the development of core technology modules and an integrated aerial cognitive robotic system that …
read more
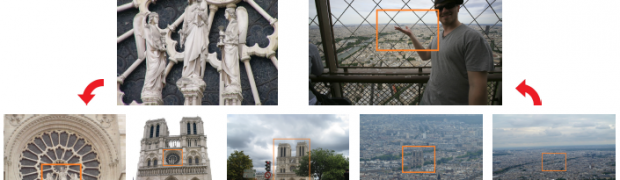
Ondrej Chum received ERC.cz Grant Generalized Image Retrieval and Relation Discovery In the project, will be generalized the retrieval of related images beyond search of visually similar images. Team will study various definitions of relatedness, investigate algorithms for efficient search, and derive novel representations that support search and discovery of related images. Applications range from …
read more
D.Rozumnyi and prof. J.Matas were awarded the Honorable Mention for Outstanding Contribution at “German Conference on Pattern Recognition (GCPR)” for the publication R. Rozumnyi, J. Kotera, F. Sroubek J. Matas: Non-Causal Tracking by Deblatting. Gratulujeme!
The work of Tomas Jenicek and Ondra Chum Linking Art trhought Human Poses is discussed in MIT Technology Review article Machine vision can spot unknown links between classic artworks. Congratulations!
The VRAS group has successfully helped the global open-source robotics community by implementing the first plausible simulation model of tracked vehicles. The model has just been made available to everyone as part of the Gazebo simulator Among others, it will help the CRAS-CTU team in the global DARPA SubT challenge where a team of robots …
read more
Are you looking for an interesting topic for your bachelor or master thesis? Department of Cybernetics invites you to CyberSpace, an informal meeting with coffee and refreshments, where we present some of the projects we work on and where you can take part in the form of your bachelor/diploma project. It is an excellent opportunity …
read more
From February to July 2019, prof. Chang-hee Won of Temple University in Pennsylvania, USA will be visiting CTU as a holder of the Fulbright-CTU Distinguished Chair fellowship. His professional interests include sensors and image processing and advanced control theory. His host will be prof. Jan Kybic from the Department of Cybernetics of the Faculty of …
read more
James Pritts, Zuzana Kukelova and Ondrej Chum from Center of Machine Perception were awarded Saburo Tsuji Paper Award at 14th Asian Conference on Computer Vision (ACCV) for their paper James Pritts, Zuzana Kukelova, Viktor Larsson, Ondrej Chum: Rectification from Radially Distorted Scales. Congratulations!