Vít Listík’s diploma thesis was awarded by Cisco (supervisor Jan Šedivý). Congratulations!
Paper Efficient Scene Text Localization and Recognition with Local Character Refinement by Jiří Matas and Lukáš Neumann received Best Paper prize at ICDAR 2015. Congratulations!
Tomáš Svoboda discussed on DVTV with Martin Veselovský the future of transportation systems and autonomous vehicles (in Czech). Many thanks for successful representation of our department!
Former member of our departmant, Zuzana Kúkelová, recieved The Cor Baayen Award of ERCIM which is given each year to a promising young researcher in computer science and applied mathematics. Zuzana received this award mostly for her work done at our department under the supervision of Dr. Tomáš Pajdla. Zuzana currently works as a postdoctoral …
read more
Let us invite you to a talk (more info in Czech) of Dr. Janet L. Kavandi, astronaut and deputy director of NASA Glenn Research Center, organized by department of measurements. The talk will take place on September 14, 2015, 10 a.m., at Charles Square campus, in the room KN:E-107. Users who have used any other …
read more
Andrej Mikulík successfully defended his Ph.D. thesis entitled Large-Scale Content-Based Sub-Image Search (supervisor: Prof. Jiří Matas). Congratulations!
Our colleague, Assoc. Prof. Tomáš Svoboda (Center for Machine Perception, Center for Robotics and Autonomous Systems, was invited to the Magazine Leonardo (in Czech) of the Czech Radio Plus channel. He discussed (in Czech) about a rescue robot called TRADR. Many thanks for the representation of our department!
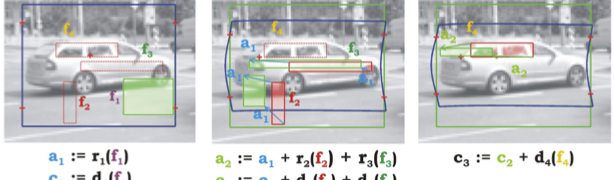
The successively evaluated features used in a sliding window detection process to decide about object presence/absence also contain knowledge about object deformation. We exploit these detection features to estimate the object deformation. Estimated deformation is then immediately applied to not yet evaluated features to align them with the observed image data. In our approach, the …
read more
We design and evaluate a data fusion system for localization of a mobile skid-steer robot intended for USAR missions. We exploit a rich sensor suite including both proprioceptive (inertial measurement unit and tracks odometry) and exteroceptive sensors (omnidirectional camera and rotating laser rangefinder). To cope with the specificities of each sensing modality (such as significantly …
read more
Adaptive traversability we understand by means of autonomous motion control adapting the robot morphology—configuration of articulated parts and their compliance—to traverse unknown complex terrain with obstacles in an optimal way. The robot measures its state (like: orientation angles, flipper mode, …) and the terrain (digital elevation model). We learn the optimal policy from loosely annotated …
read more