Matej Hoffmann has been awarded the “GAČR EXPRO” project for excellence in fundamental research from the Czech Science Foundation (https://gacr.cz/grantove-projekty-excelence-v-zakladnim-vyzkumu-expro/) for his proposal entitled “Whole-body awareness for safe and natural interaction: from brains to collaborative robots”. The grant will support him and his group for 5 years (2020-2024).
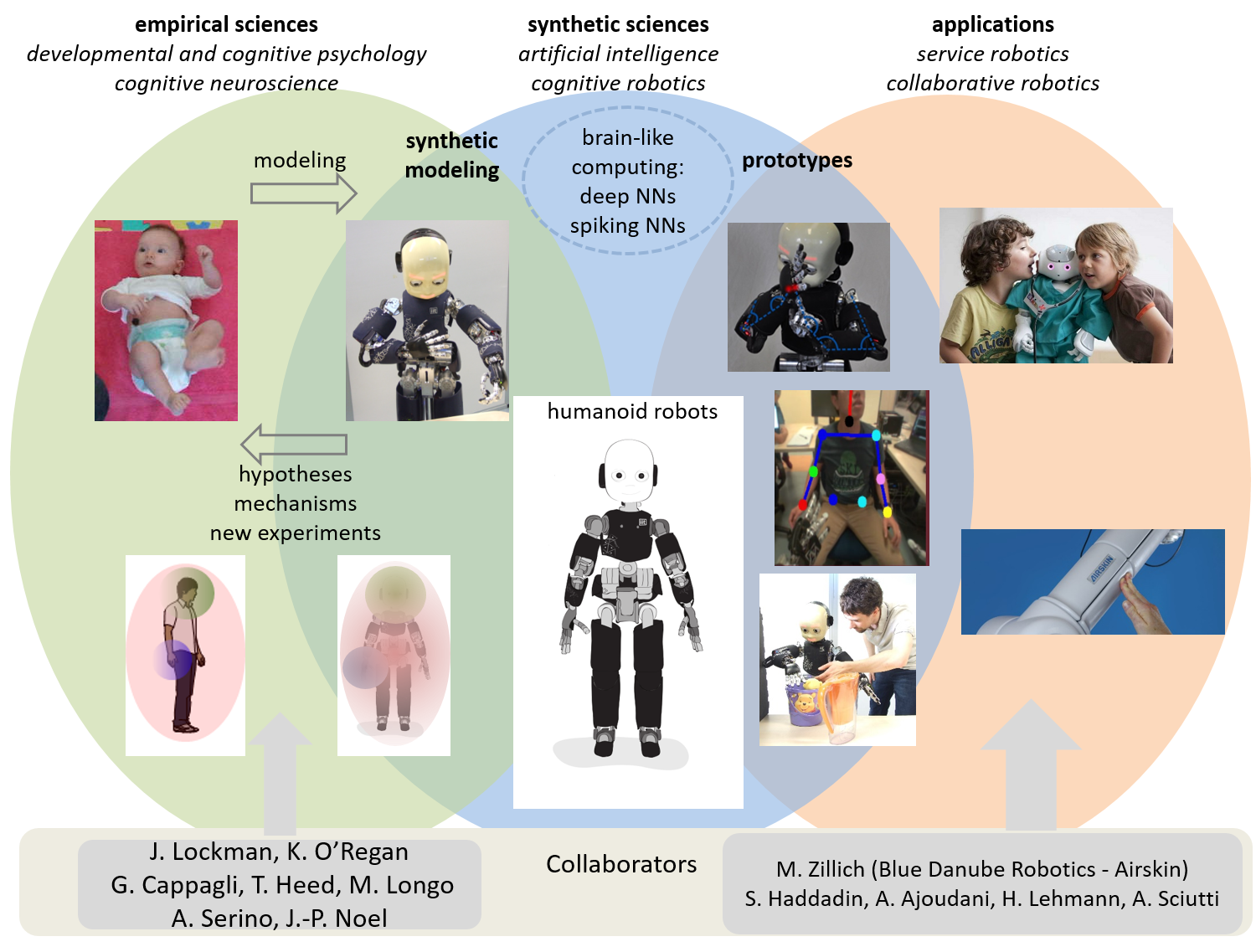
As robots are leaving safety fences and starting to share workspaces and even living spaces with humans, they need to dynamically adapt to unpredictable interactions with people and guarantee safety at every moment. The rapidly growing market of collaborative robots ensures safety through specific technologies such as force limitations by design or contact detection and stopping relying on force measurements. Humans, however, possess whole-body awareness drawing on dynamic, context-dependent fusion of multimodal sensory information, which makes them adaptive, flexible, and versatile. The first goal of this project is thus to better understand the mechanisms of body and peripersonal space representations in the brain by building embodied computational models using humanoid robots. The modeling endeavor will inform the main goal of the project – designing new perception modules and robot controllers for human-robot interaction – and also provide a proxy for what humans expect from a robot collaborator.
Project goals:
Embodied computational models of body and peripersonal space representation
Computationally optimal and transparent representations of peripersonal space
Collaborative workspace representation and control framework for safe physical HRI complying with safety standards