Stránka pouze v anglické verzi.
Karel Zimmermann úspěšně obhájil svoji habilitační práci Safe Adaptive Traversability with Incomplete Data. Gratulujeme!
Doc. Tomáš Svoboda (Vidění pro roboty a autonomní systémy) byl (telefonicky) hostem ČT24 na téma: USA: Sdílená autonomní doprava do 13 let? (rozhovor probíhá cca od 15:56).
Enable-S3 je velký projekt typu ECSEL-JU nazvaný European Initiative to Enable Validation for Highly Automated Safe and Secure Systems. Tomáš Svoboda je hlavním řešitelem na straně ČVUT. Budeme úzce spolupracovat s ValeoCZ na lepším využití dat při učení a testování v automatickém řízení automobilů.
Tomáš Svoboda diskutoval na DVTV s Martinem Veselovským o budoucnosti hromadné a osobní dopravy a o autonomních vozidlech. Děkujeme za reprezentaci katedry!
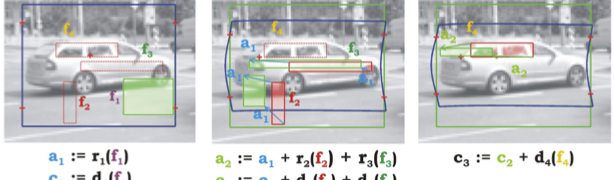
Úspěšně ohodnocené rysy, které byly použity v rámci klouzavého okna k rozhodnutí, zda na daném místě je/není objekt, obsahují také znalost o deformaci objektu. Tyto detekční rysy proto využíváme k odhadu deformace objektu. Odhadnutá deformace je následně aplikována na rysy, které dosud nebyly ohodnoceny, a ty jsou tak přizpůsobeny pozorovanému obrázku. Náš přístup učí zarovnání …
read more