Dean´s Award for the Dissertation thesis was given to Ing. Arun Mukundan, MSc. Ph.D. (supervisor doc. Mgr. Ondřej Chum, Co-supervisor Giorgos Tolias, Ph.D.) Theme: Local Descriptors for Image Matching and Retrieval Congratulations!
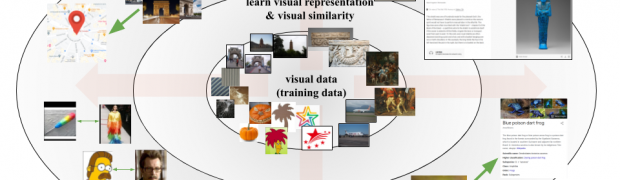
The project is entitled “Learning Universal Visual Representation with Limited Supervision” and will last 5 years (2021-2025). Human perception of visual similarity, i.e. telling whether two objects or scenes are visually similar or not, relies on a number of different factors, such as shape, texture, color, local or global appearance, and motion. Human ability to …
read more
Dean´s Award for the Dissertation thesis was given to Ing. Robert Pěnička, Ph.D. (supervisor Ing. Martin Saska, Dr. rer. nat., Co-supervisor prof. Ing. Jan Faigl, Ph.D.) Theme: Data Collection Planning For Aerial Vehicles Congratulations!
Ing. Jiří Anýž successfully defended his PhD thesis entitled Analysis of Biochemical Data Supervisor: prof. RNDr. Olga Štěpánková, CSc. Congratulations!
RNDr. Jan Stria successfully defended his PhD thesis entitled Visual Perception of Garments for their Robotic Manipulation Supervisor: prof. Ing. Václav Hlaváč, CSc, Co-Supervisor: doc. RNDr. Daniel Průša, Ph.D Congratulations!
Ing. Robert Pěnicka successfully defended his PhD thesis entitled Data Collection Planning For Aerial Vehicles Supervisor: Ing. Martin Saska, Dr. rer. nat., Co-Supervisor: prof. Ing. Jan Faigl, Ph.D. Congratulations!
Javier Alejandro Aldana Iuit successfully defended his PhD thesis entitled Relevant Shot Detection with Local Features for Video Re-ranking Supervisor: Prof. Jiří Matas, Ph.D. Supervisor-Specialist: Doc. Mgr. Ondřej Chum, Ph.D. Congratulations!
Filip Radenović, graduate of doctoral study branch Artificial Intelligence and Biocybernetics, received Antonín Svoboda´s Award for the Best Ph.D. Thesis. Theme: Visual Retrieval with Compact Image, Supervisor Assoc. Prof. Jiří Chum, Ph.D. The award is given by Czech Society for Cybernetics and Informatics (ČSKI), whose mission includes development of cybernetics and informatics in the Czech …
read more
Call Czech Society for Cybernetics and Informatics (ČSKI), whose mission includes development of cybernetics and informatics in the Czech Republic and support of pedagogical activities in related fields, announces the national competition for Antonín Svoboda Award for the Best Ph.D. The winner will gain 25,000 CZK and will be nominated to represent Czech Republic in …
read more