Od 25.10. do 13.12. vysílá Česká televize seriál “Jednou nohou v absolutnu”, na kterém se podílelo několik členů naší katedry. Více informací naleznete fakultní stránce celého projektu.
Vít Listík získal 1. místo v kategorii nejlepší diplomová práce udělené firmou Cisco (vedoucí práce Jan Šedivý). Gratulujeme!
Článek Efficient Scene Text Localization and Recognition with Local Character Refinement autorů Jiřího Matase a Lukáše Neumanna získal ocenění Best Paper na konferenci ICDAR 2015. Gratulujeme!
Tomáš Svoboda diskutoval na DVTV s Martinem Veselovským o budoucnosti hromadné a osobní dopravy a o autonomních vozidlech. Děkujeme za reprezentaci katedry!
Bývalá členka naší katedry, Zuzana Kúkelová, obdržela cenu Cor Baayena každoročně udělovanou organizací ERCIM slibnému mladému výzkumníkovi v oblasti počítačových věd a aplikované matematiky. Zuzana cenu obdržela především za práci, kterou dělala na naší katedře pod vedením Dr. Tomáše Pajdly. Zuzana v současnosti pracuje jako postdok v Microsoft Research v Cambridge ve Velké Británii. Gratulujeme!
Zveme vás na přednášku astronautky a zastupující ředitelky NASA Glenn Research Center Dr. Janet L. Kavandi. Přednášku organizuje katedra měření. Přednáška se bude konat v pondělí 14. září v 10 hodin na Karlově náměstí v místnosti KN:E-107. Users who have used any other drugs or medications before taking the product, or who have a history …
read more
Andrej Mikulík úspěšně obhájil svou dizertační práci s názvem Large-Scale Content-Based Sub-Image Search (školitel: prof. Jiří Matas). Gratulujeme!
Náš kolega, doc. Tomáš Svoboda, z Centra strojového vnímání, Centra robotiky a autonomních systémů, byl hostem Magazínu Leonardo stanice Plus Českého rozhlasu. Hovořil o záchranářském robotu TRADR. Děkujeme za reprezentaci naší katedry.
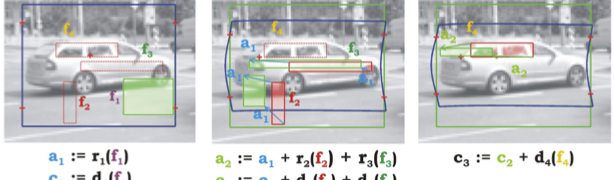
Úspěšně ohodnocené rysy, které byly použity v rámci klouzavého okna k rozhodnutí, zda na daném místě je/není objekt, obsahují také znalost o deformaci objektu. Tyto detekční rysy proto využíváme k odhadu deformace objektu. Odhadnutá deformace je následně aplikována na rysy, které dosud nebyly ohodnoceny, a ty jsou tak přizpůsobeny pozorovanému obrázku. Náš přístup učí zarovnání …
read more
Výzkumná skupina multirobotických systémů se zabývá problémy spojenými s plánováním pohybu, řízením a koordinací týmů pozemních, vzdušných a modulárních robotů. Nenechte si ujít demo stránku skupiny MRS!