Vision for Robotics and Autonomous Systems (VRAS)
We are opening several PhD and PostDoc positions. Join us on two exciting international research ventures!
In the EU Horizon project XSCAVE (4 years), you’ll work on cutting-edge algorithms and software to research high-performance, safe, and explainable perception-to-action models. These models will enable mobile machines to master challenging terrain during excavation, forwarding, and navigation tasks.
The 5-year Kolibriq project focuses on groundbreaking neuro-symbolic deep learning methods for controlling autonomous, agile aircraft navigating at low altitudes near obstacles.
These two new projects complement the large project Roboprox that has started in 2023/2024 and also still offers a few unfilled positions.
Requirements
For PhD students: We expect xcellent grades, experience in the relevant fields, good programming skills.
For PostDoc positions: We seek highly motivated applicants with a PhD in robotics, AI, or related fields and a proven track record relevant to the topic – publications in top journals or conferences (e.g. computer vision (CVPR/ICCV/ECCV), machine learning (NeurIPS/ICML), or robotics (ICRA, IROS, RSS, CoRL).
Accepted PostDoc researchers will receive initial appointment for 1 year (with an extension of up to 3 years, based on annual performance evaluation). Gross salary of about 3,200 EUR monthly; check the Numbeo database for the cost of living in Prague
Full social and health insurance and 30 days of paid annual leave
Successfull PhD candidates will get a full tuition waiver and a monthly compensation equivalent to about 1850 EUR of gross income (the Czech Republic’s cost of living is at 59% of the US price level, according to OECD statistics).
About the workplace
The group has a strong track record in machine perception and computer vision. More recently, there has been substantial development in robotics, with groups focusing on search and rescue robotics. The group, together with roboticists from the Department of Computer Science and the group Multi Robotic Systems, form the Center for Robotics and Autonomous Systems. The robotics teams have recently succeeded in numerous competitions: the CTU team ranked 3rd overall and 1st among self-funded teams in the Tunnel Circuit round (2019) and the Urban Circuit (2020) of the DARPA SubTerranean challenge and was 2nd overall in the Final Event (2021) in the Virtual challenge.
Hardware infrastructure at the Department includes wheeled, tracked, and legged robots (including 2 Spots and 2 Spots with arm) for search and rescue operation, industrial as well as collaborative or lightweight manipulators (KUKA LBR iiwa, UR10e with Airskin, Kinova Gen3), flying robots – fleets of UAVs, and humanoid robots (iCub, Pepper, 2x Nao). The Department has access to a high-performance computational cluster dedicated to artificial intelligence research and developments using traditional multi-CPU systems, as well as GPUs.
How to apply
Please send your application or inquiries to Ms. Petra Ivaničová (ivanipet@fel.cvut.cz) with “VRAS – Open positions” in the subject and include the following, preferably in a single pdf file:
- CV
- Full publication list
- Motivation letter
- List of at least two referees, PostDoc applicants, add at least one recommendation letter to the package
- PhD applicants: your most interesting research paper and your master thesis (if applicable)
- PhD applicants: transcript of grades of master/bachelor
The positions are open until filled.
Prague
There is currently a very lively international ecosystem in the areas of robotics and AI – at the Department and in Prague in general. See, for example, prg.ai and the Practical Guide
Prague was TripAdvisor’s #7,#8, and #11 world’s top destinations in the years 2017-19. Beautiful mountain landscapes and historic cities are within reach. Owing to Czechia’s Schengen-area membership, numerous exquisite European destinations can be reached from Prague with no border restrictions or delays.
We are always looking for strongly motivated Ph.D. students as well as undergraduate students. We often have an opening for post-doc positions. If you are interested in what we are doing and want to join us, send us your resume to Tomas Svoboda.
The group is also a part of Center for Machine Perception, CMP, and involved in Center for robotics and autonomous systems, CRAS. Humanoid and cognitive robotics group also belongs to us.
github/ctu-vras, VRAS YouTube channel, VRASleaflet.pdf
| Name | Team | Rank | Phone | Office | position | ||
|---|---|---|---|---|---|---|---|
| Bauerová Justýna | VRAS | External | 20 | ||||
| Ing. | Brož Bohumil | VRAS | External | 20 | |||
| Cachová Johanka | VRAS | External | +420 775986645 | 20 | |||
| Ing. | Cvrček Vojtěch | VRAS | External PhD student | +420 22435 5732 | 15 | ||
| Ing. | Číhala Valentýn | VRAS | Researcher and Internal PhD | +420 22435 5757 | E227 | 09 | |
| D´Angelo Giulia Ph.D. | VRAS | Researcher | E208 | 08 | |||
| Gama Filipe | VRAS | Internal PhD student | 14 | ||||
| Goasguen Loïc Ph.D. | VRAS | Researcher | +420 22435 7576 | E220 | 08 | ||
| Ing. | Herold Adam | VRAS | Research Fellow | +420 22435 7391 | E225B | 11 | |
| Ing. | Himmel Bedřich | VRAS | Researcher | +420 22435 7391
+420 602252337 |
E225B | 08 | |
| doc. Mgr. | Hoffmann Matěj Ph.D. | VRAS | Associate professor | +420 22435 7387 | E211 | 06 | |
| Hrynevich Yana | VRAS | External | 20 | ||||
| Bc. | Chalupníková Tereza | VRAS | External | 20 | |||
| Chen Haofeng Ph.D. | VRAS | Researcher | +420 22435 7583 | E209 | 08 | ||
| Ing. | Kasarda Michal | VRAS | Researcher and Internal PhD | +420 22435 5700 | E227 | 09 | |
| Khoury Jason MSc. | VRAS | Researcher and Internal PhD | +420 22435 7576 | E220 | 09 | ||
| Kolembusová Bianka | VRAS | External | +420 421948770108 | 20 | |||
| Ing. | Kučera Aleš | VRAS | Researcher and Internal PhD | +420 22435 5700 | E227 | 09 | |
| Lehmann Hagen Ph.D. | VRAS | External | 20 | ||||
| Ing. | Lísková Šárka | VRAS | Researcher and Internal PhD | +420 22435 7576 | E220 | 09 | |
| Marcel Valentin Ph.D. | VRAS | External | 20 | ||||
| Mgr. | Moravec Jaroslav | VRAS | Researcher and Internal PhD | +420 22435 7344 | G103 | 09 | |
| Muzikář Matthew | VRAS | External | 20 | ||||
| Patni Shubhan Parag MSc. | VRAS | Researcher and Internal PhD | +420 22435 7583 | E209 | 09 | ||
| Mgr. | Pecka Martin Ph.D. | VRAS | Researcher | +420 22435 7269 | E225B | 08 | |
| Ritirato Paolo MSc. | VRAS | Research Fellow | +420 22435 7609 | E209 | 11 | ||
| Ing. | Rozlivek Jakub Ph.D. | VRAS | External | 20 | |||
| Ing. | Rustler Lukáš | VRAS | Researcher and Internal PhD | +420 22435 7576 | E220 | 09 | |
| Ing. | Straka Zdeněk Ph.D. | VRAS | Researcher | +420 22435 7583 | E209 | 08 | |
| Bc. | Sun Yuanzheng | VRAS | Research Fellow | +420 22435 7609 | E209 | 11 | |
| Prof. Ing. | Svoboda Tomáš Ph.D. | VRAS | Full Professor | +420 22435 7448 | E226 | 02 | |
| doc. Ing. | Šára Radim Dr. Tech. | VRAS | Associate professor | +420 22435 7203 | G103A | 06 | |
| Tcaci Popescu Sergiu Ph.D. | VRAS | External | 20 | ||||
| Ing. | Vlk Jan | VRAS | Researcher and Internal PhD | +420 22435 5700 | E227 | 09 | |
| MSc. | Yakoub Ninib | VRAS | Researcher | +420 22435 7576 | E220 | 08 | |
| doc. Ing. | Zimmermann Karel Ph.D. | VRAS | Associate professor | +420 22435 5733 | E226 | 06 |
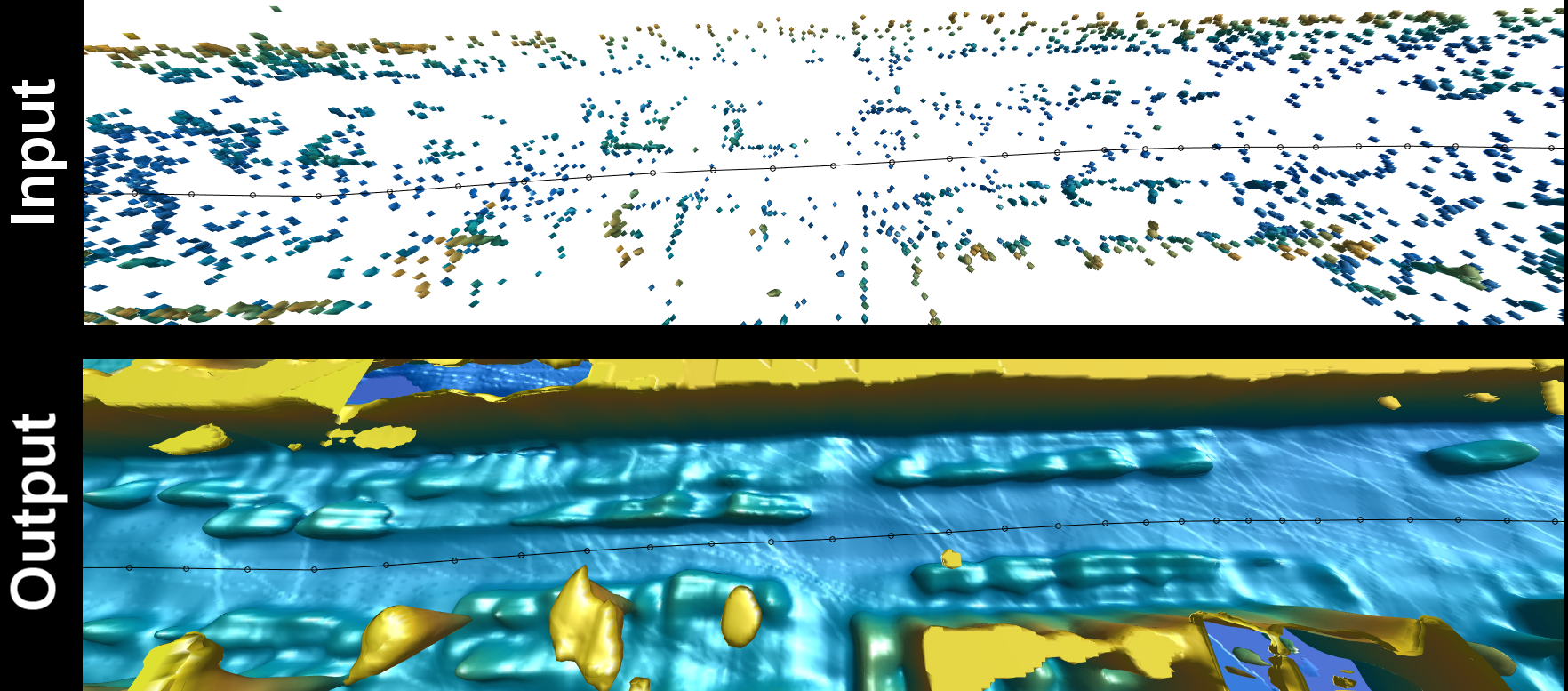
- KKT-Loss Novel loss for learning the shape of terrain from the robot trajectory.
- Publication lists: T. Svoboda, K. Zimmermann, M. Hoffmann, R. Sara.
- Research codes.
Videos
More at VRAS YT Channel, and group’s YT Playlist
Demos
Learning for Active 3D Mapping
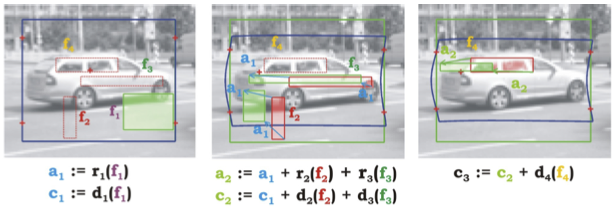
Non-rigid object detection with local interleaved sequential alignment

Data fusion for localization and mapping

Adaptive traversability
- [ENDEAVOR] Event Driven Active Vision for Object Perception. Project funded by European Commission (Horizon Europe No. 101149664, call: Marie Sklodowska-Curie Actions). Principal investigator: Giulia D´Angelo. 06/2024 – 05/2026
- [ROBOPROX] Robotics and advanced industrial production. Project funded by European Commission (Operační program Jan Amos Komenský No. CZ.02.01.01/00/22_008/0004590). Principal investigator: Zdeněk Hanzálek. 06/2023 – 06/2028. We are reponsible for RA09 – Resilient machines through continuous learning and sensing, PI Tomáš Svoboda.
- End-to-end differentiable physics-aware architectures for self-supervised learning in robotics. Project funded by Czech Science Foundation (Standard project GACR No. GA 24-12360S). Principal investigator: Karel Zimmermann. 01/2024 – 12/2026
- Czech Science Foundation by project 20-29531S – Autonomous time-critical exploration of communication and perception constrained environment by team of robots. (2020-2022). Karel Zimmermann.
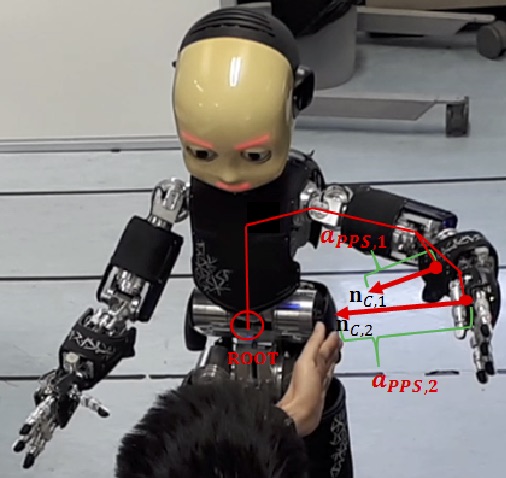
- Whole-body awareness for safe and natural interaction: from brains to collaborative robots. “GAČR EXPRO” project for excellence in fundamental research from the Czech Science Foundation (2020-2024). PI: Matěj Hoffmann.
- IPALM Interactive Perception-Action-Learning for Modelling Objects. PI: Matěj Hoffmann.
- We lead the CTU-CRAS team into the DARPA SubTerranean Challenge (2019-2021). PI Tomáš Svoboda.
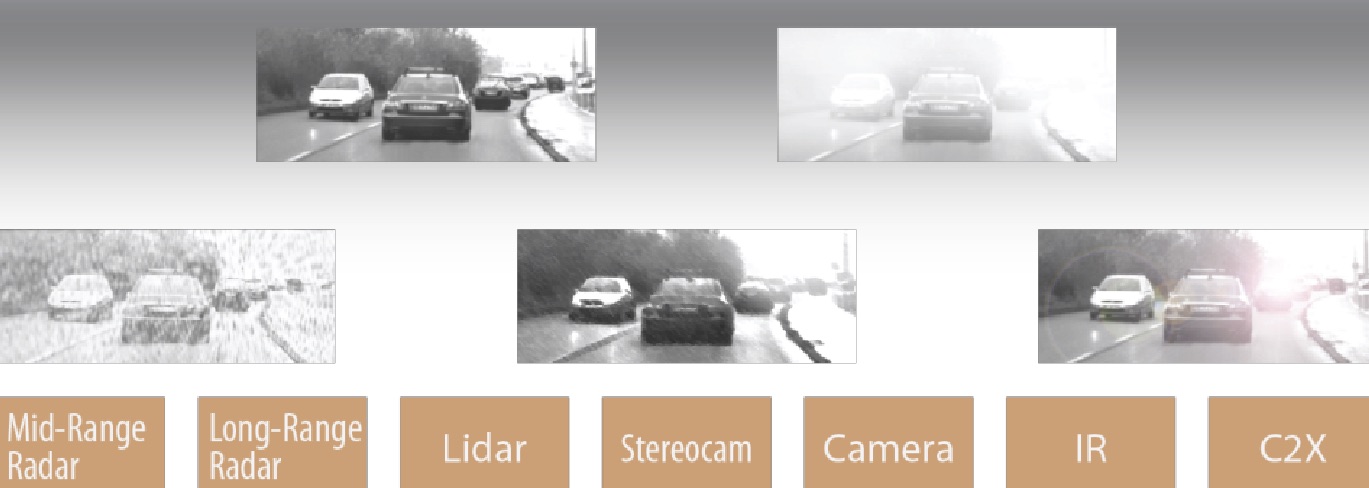
- Enable-S3 H2020 EU large integrated project, we are working in automotive field. (2016-2019), PI Tomáš Svoboda.
- Robot self-calibration and safe physical human-robot interaction inspired by body representations in primate brains Czech Science Foundation. (2017-2019), PI: Matěj Hoffmann.

Werner von Siemens Awards 2025

Helhest from CTU succeeded in the Alps, heads into practice

Dr. Giulia D’Angelo was awarded the Prestigious Le Tecnovisionarie® 2025 International Prize

CTU Scientists Are Developing a Tactical Robot

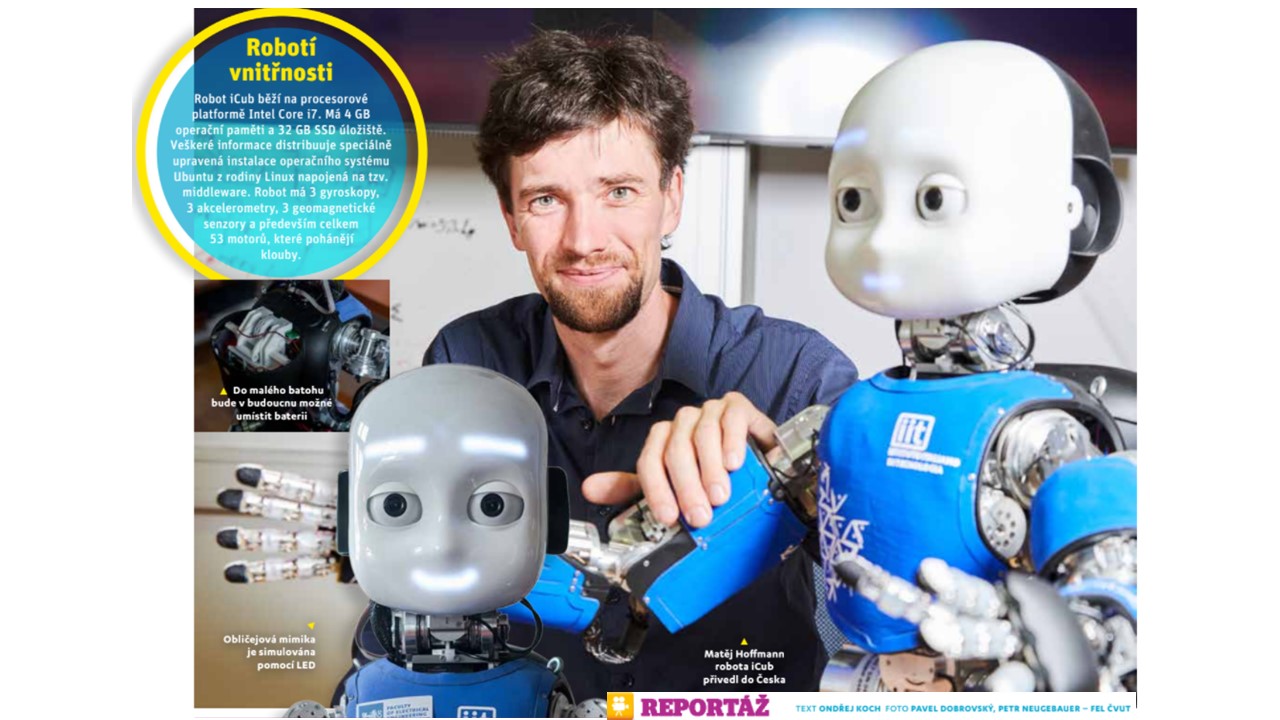
A profile of Matěj Hoffmann in monthly journal Hrot

The team from FEL CTU and Fly4Future will fight for the title in the “Champions League” of autonomous drones in Abu Dhabi
Czech scientists are working to improve robots

Long term project collaboration with Lockheed Martin
Patrik Vacek defended his Ph.D. thesis

Matěj Hoffmann´s comments on the new model of Humanoid robot by Figure AI

Succes in the Czech Science Foundation GAČR competition for three projects from our department

Valentin Marcel became two times world champion in Chessboxing

Robot dogs and drones as part of a security camera system?
Petr Švarný defended his Ph.D. Theses
News report in Nový Prostor about visit to the humanoid lab

Discussion about autonomous cars on the Czech radio


Four-legged robot SPOT on a mission to explore the Prague underground
Vojtěch Šalanský defended his Ph.D. Thesis
(Česky) Robopsi SPOT provedou středoškolačky a středoškoláky technologiemi budoucnosti


Christmas Video Success 2021
Our robots wish everyone a Merry Christmas

Rector of the CTU awarded medals for extraordinary performances during the coronavirus

Spot, Charlie and Daisy at the Crystal Loupe 2021

(Česky) Oslava jubilea. Sto let od vymyšlení robota chystají Češi pokročilé stroje budoucnosti

Our robots in CT24 studio


SPOT appeared on CT 😀 in the new documentary series Futuro
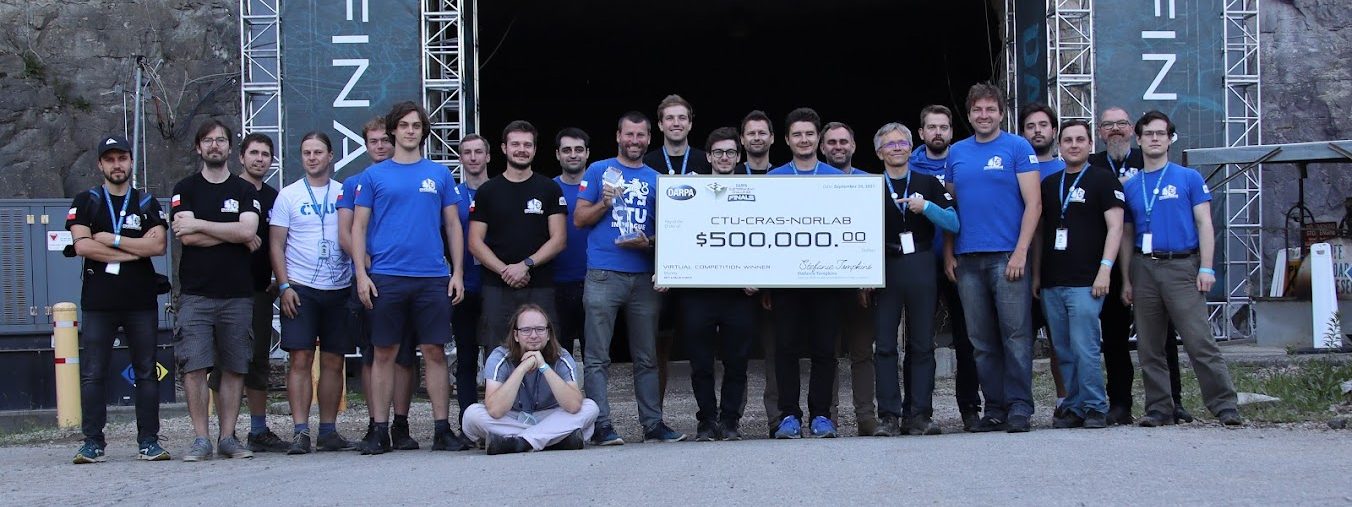
The CTU-CRAS-NORLAB team in Kentucky took silver in the virtual competition and finished sixth in the real robot competition

Czech Television reports on the DARPA SubT Challenge final

Let’s cheer together every day!
“Robot Olympics” begins next week in Kentucky
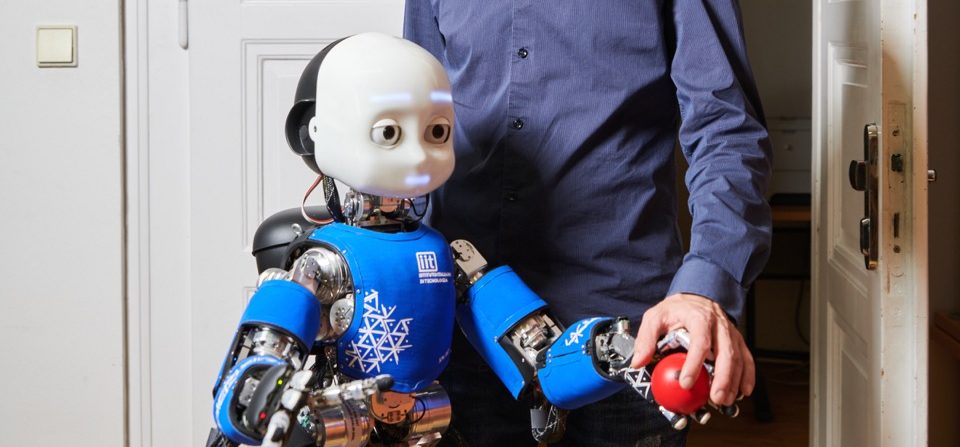
The line-up of humanoid robots has been expanded by iCub
Matej Hoffmann and Filipe Gama on IEEE Spectrum
Four-legged SPOT back on Seznam Zprávy

The best robots SPOT and DAISY trained rescue work in Bull Rock. In September they want to conquer America

Drones contrary to bats. How robots trained in the Bull Rock Cave

Teams of our employees and students best in this year’s Bike to Work Challenge

Robots will train in the cave

Robot SPOT, doc. Zimmermann and Ing. Rouček appeared on Czech Television News
CT 24 set out to walk the four-legged robot SPOT

SPOT on Czech TV
Capek would be surprised – A robot from CTU will take part in a competition for millions of dollars
The four-legged SPOT will fortify the DARPA team
Robot Spot in media

Tomas Svoboda took over the diploma of professorship from the rector doc. Petracek
Martin Pecka defended his PhD thesis

(Česky) Naše drony a pozemní roboty budou zkoumat jeskynní komplex Býčí skála

(Česky) Členové týmů MRS a VRAS naší katedry připravili spolu s CIIRC ČVUT pipetovací roboty pro testování vzorků na Covid-19

(Česky) Matěj Hoffmann a Petr Švarný v podcastu Vše o průmyslu
(Česky) Tým CTU-CRAS získal ceny v soutěži AI Awards za úspěch v mezinárodní robotické soutěži
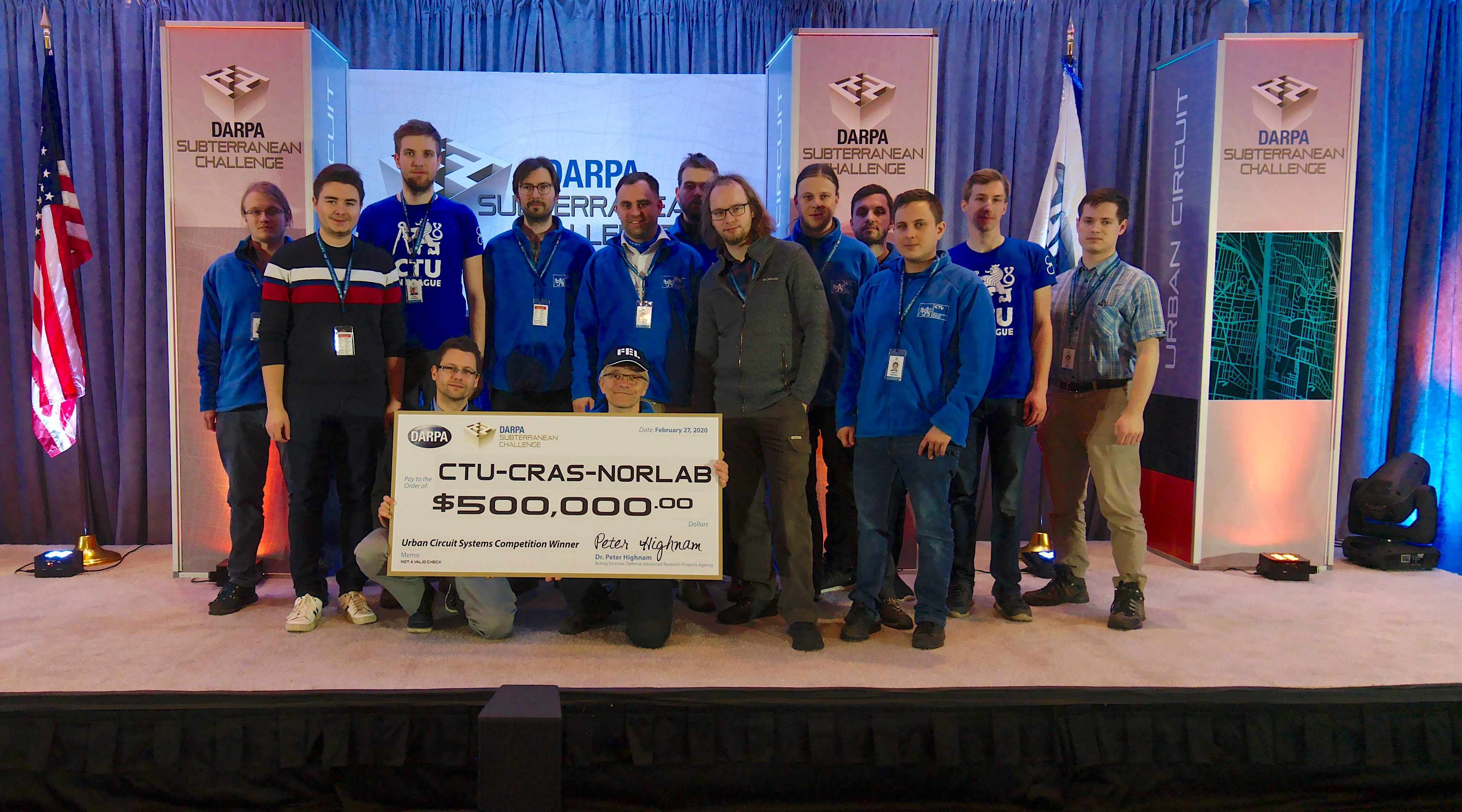
Our Roboticists won at the DARPA Subterranean Challenge Urban Circuit among self-funded teams and scored 3rd overall
(Česky) DARPA 2020
Interview with Matej Hoffmann in Control Engineering Czech Republic
NEW GACR EXPRO Project

Success of CTU-CRAS’ robots in US in Main evening news, Czech TV

Karel Zimmermann received Dean’s Award for Teaching
CTU-CRAS from the Department of Cybernetics Won the Darpa Subterranean Challenge Tunnel Circuit Among Non-Sponsored Teams and Took the Overall 3rd Place
Tracked vehicle simulation model for Gazebo
Dean’s Award for the Dissertation thesis was given to Ing. Vladimir Kubelka, Ph.D.
Ing. Vladimír Kubelka defended his Ph.D. thesis
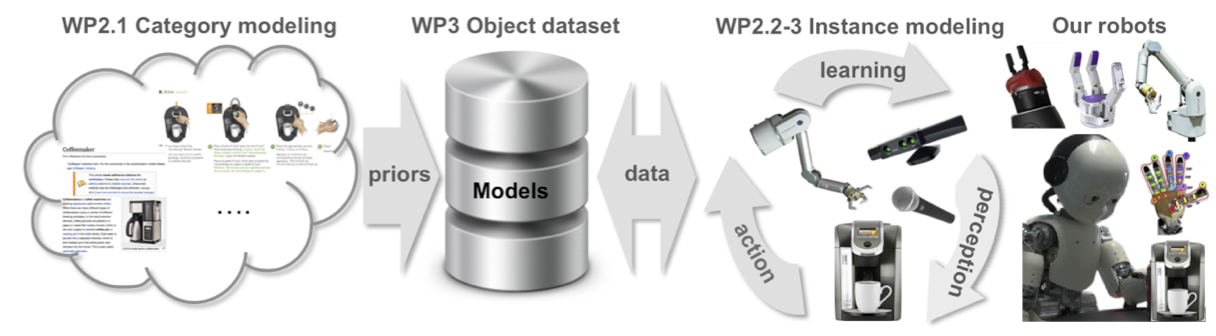
Interactive Perception-Action-Learning for Modelling Objects

BODIS – workshop at IROS2018
Human-robot interaction at HRI 2018

The little android with a sense of touch
Ing. Tomáš Petříček defended his Ph.D. thesis

Kuka Innovation Award 2018

The project RobotBodySchema has become a Partnering project of the Human Brain Project
ICCV 2017 talk of Karel Zimmermann
Ing. Kubelka presented a rescue mobile robot Charlie in Czech TV

ENNS Best Paper Award

BMVC 2017 best science paper honourable mention for A. Mukundan, G. Tolias, O. Chum
Karel Zimmermann has successfully defended his habilitation thesis
Tomáš Svoboda guest on CT24 on the topic: USA: Shared Autonomous Transport in 13 Years?
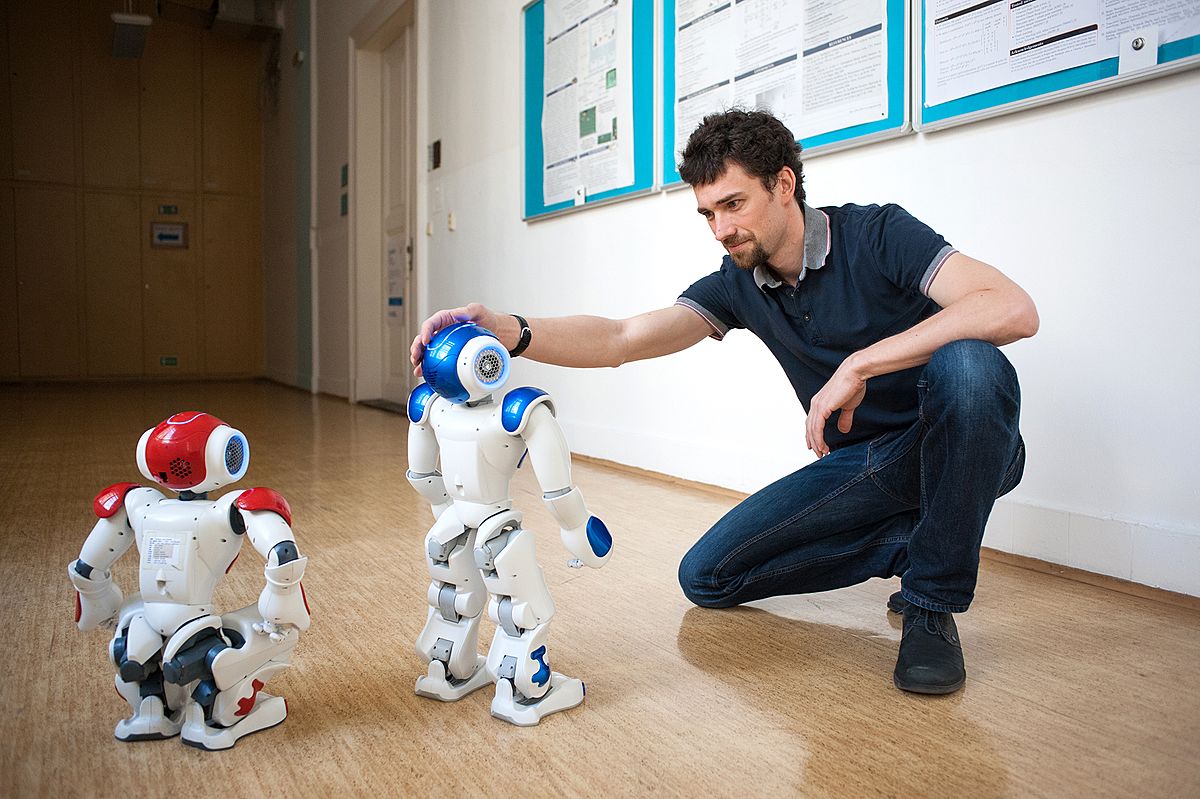
Humanoid robots learn to sense their body

Rescue robot goes to Italy
New EU project, Enable-S3
